
A team of researchers at Yale University’s Department of Mechanical Engineering and Materials Science, has developed a robot hand that employs a caging mechanism. In their paper published in the journal Science Robotics, the group describes their research into applying a caging mechanism to robot hands and how well their demonstration models worked.
As the researchers note, most robot hands do their work by manipulating objects with their fingertips. This approach allows for a certain degree of dexterity but is still far from that demonstrated by the human hand. In this new effort, the team at Yale noted that one of the factors that make the human hand able to handle objects with such dexterity is the use of the palm in conjunction with the fingers. They refer to such manipulations as caging—in which fingers on both sides of an object make use of a palm to form a cage of sorts when grasping an object.
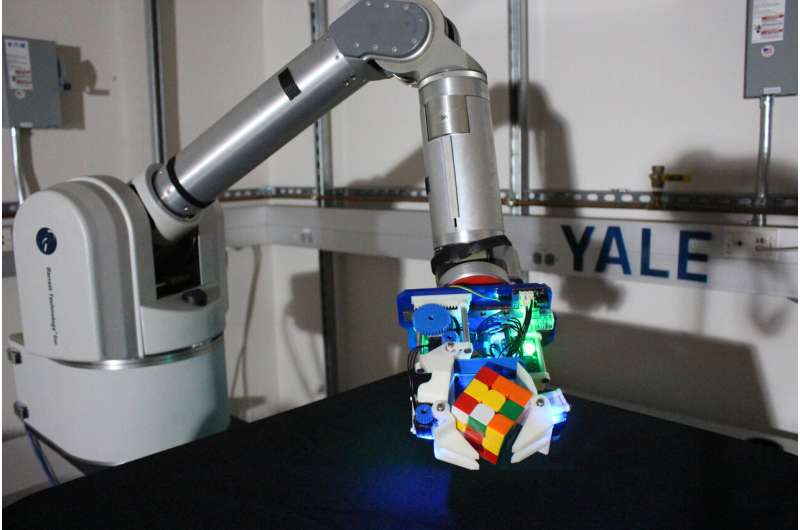
To add caging to a robot’s capabilities, the researchers built a hand with two fingers situated opposite of two other fingers—all of the fingers also featured mid-finger knuckle joints that allowed them to bend around an object. The base of the hand served as a palm. The overall design is highly reminiscent of clam grapplers used by loggers, but with much more dexterity. The fingers are moved using six servo motors combined with wheels and pulleys.
The researchers tested the capabilities of the robot with tasks that grew increasingly difficult. The first involved using three cylinders and a cube to test the ability of the hand to hold and change the position of an object it was holding. Another involved changing the orientation of a held object. They also tested the ability of the hand to grasp different objects in the traditional way, by simply squeezing gently and lifting. They then moved on to more difficult tasks, such as grasping a mustard bottle, spinning it upside down and squeezing it to eject a small amount of the condiment. They also tested the ability of the hand to transfer power from grasping to pinching an orange without losing its grip. More testing showed the hand able to juggle Baoding balls.
The researchers conclude by suggesting their design opens the door to new kinds of robotic hands that will provide more capabilities than those now in use.
Team develops robot hand capable of handling eggs and cutting paper with scissors
Walter G. Bircher et al. Complex manipulation with a simple robotic hand through contact breaking and caging, Science Robotics (2021). DOI: 10.1126/scirobotics.abd2666
Interview with the researchers
© 2021 Science X Network
Citation:
A highly dexterous robot hand with a caging mechanism (2021, May 13)
retrieved 5 June 2021
from https://techxplore.com/news/2021-05-highly-dexterous-robot-caging-mechanism.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.
For all the latest Technology News Click Here
For the latest news and updates, follow us on Google News.