
Reconfigurable or “transformer” systems are robots or other systems that can adapt their state, configuration, or morphology to perform different tasks more effectively. In recent years, roboticists and computer scientists worldwide have developed new autonomous and reconfigurable systems for various applications, including surveillance, cleaning, maintenance, and search and rescue.
Researchers at the Singapore University of Technology and Design (SUTD) have recently designed a new reconfigurable robot that could assist humans with cleaning and maintenance. This system, introduced in a paper published in the Journal of Mechanical Design, is based on a heuristic approach that could ultimately also be used to create other reconfigurable robots.
“Current reconfigurable robotic systems emphasize software, control and electrical module development,” Dr. Abdullah Aamir Hayat, one of the researchers who carried out the study, told TechXplore. “Prior work on transformable systems identified three main transformation principles: expand/collapse, expose/cover, fuse/divide, and 20 facilitators were studied and reported by Prof. Kris L. Wood’s group. Furthermore, the abstract mapping between behavior and mechanisms were studied by our group and reported as Transformation design Principles as enablers for designing Reconfigurable Robots. However, there is a lack of a heuristic approach to designing reconfigurable robotic systems and sub-systems for real-life applications like cleaning and maintenance.”
The first objective of the recent work by Hayat and his colleagues was to devise a new heuristic approach that could be used to develop reconfigurable robotic systems. The project, which spanned three years, was funded by the Robotics Enabling Capabilities and Technologies grant and conducted by Hayat in collaboration with his colleagues Dr. Karthik Elangovan, Mr. Manivannan Kalimuthu, Mr. Lim Yi, and Mr. Prathap Kandasamy, under the guidance and supervision of Prof. Mohan Rajesh Elara at SUTD and Prof. Kris L. Wood at University of Colorado Denver.
The heuristic approach they developed consists of three layers, namely the input, output, and formulation layer. While three layers are inherent to most if not all design processes, the components that the team included in the output layers are specifically tailored to support the transformation of reconfigurable systems.
“Our proposed heuristic approach also highlights the forward and inverse design essential for testing, optimizing and iterating processes,” Hayat said. “Using this framework, we designed a reconfigurable robotic system and sub-systems for the pavement cleaning and maintenance task.”
The design of the reconfigurable robotic system created by Hayat and his colleagues, dubbed Panthera, is based on a series of mechanical sub-systems. Firstly, the system has a varying footprint that supports its reconfiguration. Secondly, it is based on transmission, which can be adapted to achieve efficient steering and locomotion.
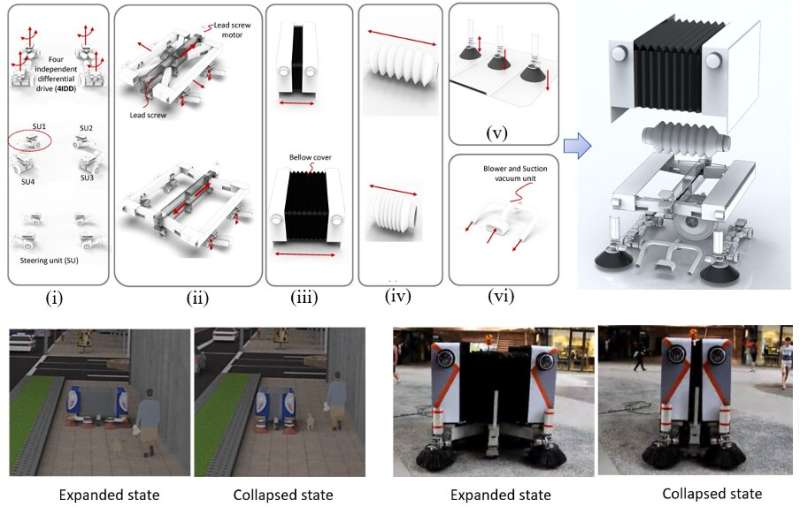
In addition, the system features an outer skin or cover, which serves as its body, a storage bin to collect litter, a surface cleaning component (i.e., sweeping brushes), a vacuum/suction component and a blowing component. Combined, all of these design features allow the system to clean its surroundings, adapting its configuration according to the task it is completing.
“The advantage of reconfigurable shape in the pavement sweeping robot is twofold,” Hayat explained. “Firstly, the robot can configure its shape autonomously as per the pavement width making it one design to fit in multiple pavements and enhancing area coverage and secondly It can adjust its shape to allow the smooth flow of pedestrians according to the density of the pedestrian movement.”
The robotic system studied and designed by Hayat and his colleagues is capable of omnidirectional locomotion, which essentially means that it can move in all directions within its environment. This ability is enabled by four independent steering and locomotion components that allow the robot to make sharp turns while cleaning and cover greater surface areas.
“Our heuristic approach was derived by extracting meaningful steps while designing the practical reconfigurable robotic system,” Hayat said. “The approach’s sub-systems can be adapted for any design projects based on principle of transformation and for specific applications, like accessing difficult terrains, staircases, etc.”
The researchers evaluated their reconfigurable system in a series of preliminary tests and found that it achieved promising results. In their next studies, however, they would like to work on improving its performance further.
For instance, Hayat and their colleagues could try to broaden their robot’s features and functionalities using other transformation principles. More specifically, they could introduce mechanisms that make the system expand or collapse, expose or cover itself, fuse different components or separate them, and more.
In the future, the robotic system developed by this team of researchers be introduced in real-world settings to automate cleaning and maintenance tasks. In addition, the heuristic approach and architecture underpinning it could be used to create other reconfigurable systems, including autonomous vehicles or robots for other purposes.
“Future developments plan to scale these principles in designing novel reconfigurable robots for challenging terrains and application,” Hayat added. “We are also looking to establish a mechanisms library supporting the transformation principles and facilitators. This is aimed at helping the designers in ideating and selecting suitable mechanisms supporting the required transformation behavior. Moreover, we are investigating the generative designs for reconfigurable robotic systems.”
A framework to evaluate and compare self-reconfigurable robotic systems
A. A. Hayat et al, Reconfigurable Robotic System Design With Application to Cleaning and Maintenance, Journal of Mechanical Design (2022). DOI: 10.1115/1.4053631
© 2022 Science X Network
Citation:
A reconfigurable robotic system for cleaning and maintenance (2022, May 11)
retrieved 11 May 2022
from https://techxplore.com/news/2022-05-reconfigurable-robotic-maintenance.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.
For all the latest Technology News Click Here
For the latest news and updates, follow us on Google News.