
Multimodal locomotion and cargo transportation of magnetically actuated quadruped soft microrobots
Recently, a research team from Shenzhen Institute of Advanced Technology, Chinese Academy of Sciences, proposed a bionic quadruped soft thin-film microrobot actuated by magnetic fields with a mass of only 41 mg, which promises to be applied to stomach examination and treatment. Researchers realized the multimodal locomotion control of the soft microrobot in magnetic fields and the grasping and transportation of micro-objects by the soft microrobot.
The new paper, published in Cyborg and Bionic Systems, details the process of making the microrobot and the magnetization process, presents the mechanism of microrobot’s locomotion and cargo transportation, and demonstrates the microrobot transporting multiple microbeads from different locations to the target position.
Untethered microrobots have received much attention for their potential in biomedical applications and small-scale micromanipulation. “Due to the fact that magnetic fields are harmless to biological cells and tissues, magnetic fields are widely used to actuate microrobots for biomedical applications,” explained study author Tiantian Xu , a professor at the Shenzhen Institute of Advanced Technology, Chinese Academy of Sciences.
Inspired by intelligent creatures in nature, researchers designed and fabricated a new untethered quadruped soft thin-film microrobot consisting of 4 magnetic soft legs with special magnetized profiles and a nonmagnetic film body. The robot with simple structure was fabricated by demolding technology, and the molds were produced by high-precision 3D printing process.
 When a conical magnetic field is applied, the robot can walk on surface. (C & D) When a rotating magnetic field is applied, the robot can roll on surface.. Credit: Chenyang Huang, Shenzhen Institute of Advanced Technology, Chinese Academy of Sciences")
According to the researchers, by using different actuating magnetic fields, the microrobot was able to achieve multimodal locomotion, including straight travel and scrolling. By generating a conical magnetic field, the microrobot can alternately move its legs to achieve walking on a flat surface, just like the gait of a quadruped.
The quadruped microrobot not only has stable multiple movement modes and flexible steering control but also can move in a variety of complex obstacle environments. The microrobot can walk across 3 levels of steps, each with a height of 1mm. In addition, the quadruped microrobot can move on the bottom of the stomach model filled with grooves.
The robot can walk over some low obstacles that are approximately 2.2mm high. When the height of the obstacle is larger, the advantage that the microrobot has multimodal locomotion will show up. In this case, the microrobot can switch to rolling mode to cross the obstacle.
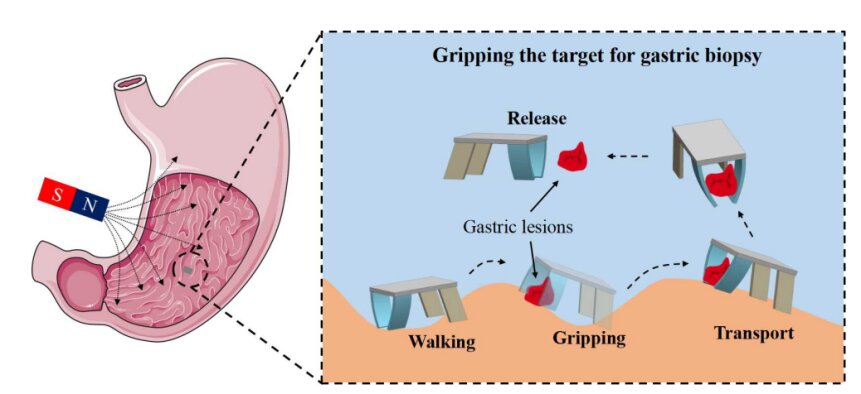
The quadruped microrobot not only has excellent obstacle-crossing capability but also has excellent cargo gripping capability. The magnitude of the magnetic field component in the lateral direction of the microrobot body enables the adjustment of the distance between the rear legs of the microrobot, which enables the gripping and releasing of cargo.
 The quadruped microrobot walks across 3 flights of steps. (B) The quadruped microrobot moves on the bottom of the stomach model flled with grooves. Credit: Chenyang Huang, Shenzhen Institute of Advanced Technology, Chinese Academy of Sciences.")
Researchers have succeeded in controlling the microrobot transporting 2 target beads in different positions to the specified target location, which actually verifies the ability to grip and transport the cargo. As for the load capacity, experimental results show that the microrobot can grasp and transport objects up to 3 times its own weight.
Different from the existing wired soft robots that have been used in the medical field, the quadruped soft microrobot proposed by the Shenzhen Institute of Advanced Technology has better moving capability, obstacle-crossing capability and target transportation capability due to the advantage of multimodal locomotion.
Looking forward, Prof. Xu said that the quadruped soft microrobot is expected to be applied to stomach examination and treatment. And they will continue to optimize the microrobot design toward more efficient motion and better gripping capabilities.
More information:
Chenyang Huang et al, Multimodal Locomotion and Cargo Transportation of Magnetically Actuated Quadruped Soft Microrobots, Cyborg and Bionic Systems (2022). DOI: 10.34133/cbsystems.0004
Provided by
Beijing Institute of Technology Press
Citation:
Multimodal locomotion and cargo transportation of magnetically actuated quadruped soft microrobots (2023, March 7)
retrieved 7 March 2023
from https://techxplore.com/news/2023-03-multimodal-locomotion-cargo-magnetically-actuated.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.
For all the latest Technology News Click Here
For the latest news and updates, follow us on Google News.