
A team of researchers at the University of Zurich, has developed a highly agile quadrotor drone that is able to avoid obstacles and carry out trajectory tracking. In their paper published in the journal Science Robotics, the group describes how they designed their drone, what they put into it and how well it worked when tested.
Quadrotor drones can be very agile fliers, most particularly when they have a human pilot guiding their movements. Autonomous quadrotors, on the other hand, have suffered from agility issues, particularly when traveling at high speeds. In this new effort, the team in Switzerland has improved the agility of a quadrotor drone with their new design built using a variety of technologies.
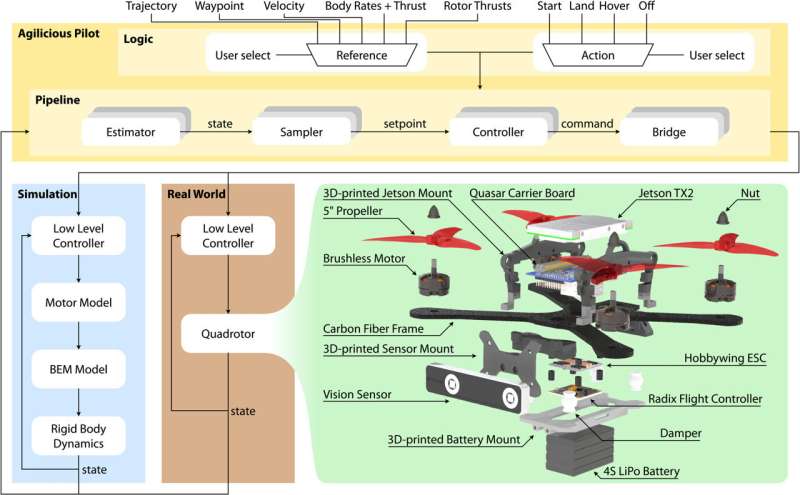
The new design involved adding onboard vision sensors, monitoring systems for flight control and a host of other components meant to improve the ability of the drone to receive and process flight information in real time. They also added an advanced AI module, NVIDIA Jetson TX2—one that is able to carry out complex tasks supporting the drone’s hardware quickly enough to allow for smooth agile flight.
The researchers tested their drone under a wide range of flights, from slow and steady, to full speed to obstacle avoidance. They found their drone capable of maintaining agility at speeds ranging from 50 to 70 kph. They also found it could conduct motion-capture trajectory tracking, where the drone continuously observes its position in the air and adds time instances to show where it is and when. They also tested its use in virtual reality simulations. And they also noted, that the system was able to learn as it went and because of that its performance improved over time.
In looking at the results of their testing, the researchers found that their drone outperformed other systems in both agility and obstacle tracking and avoidance. They suggest its performance raises it to the degree that it could be used for time-sensitive real-world missions, such as search and rescue operations and perhaps delivery of goods. The team has also made both the software and hardware open source, allowing anyone who wishes to use their design to do so.
Tiny drone based on maple seed pod doubles flight time
Philipp Foehn et al, Agilicious: Open-source and open-hardware agile quadrotor for vision-based flight, Science Robotics (2022). DOI: 10.1126/scirobotics.abl6259
© 2022 Science X Network
Citation:
Open-source and open hardware autonomous quadrotor flies fast and avoids obstacles (2022, June 28)
retrieved 28 June 2022
from https://techxplore.com/news/2022-06-open-source-hardware-autonomous-quadrotor-flies.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.
For all the latest Technology News Click Here
For the latest news and updates, follow us on Google News.