
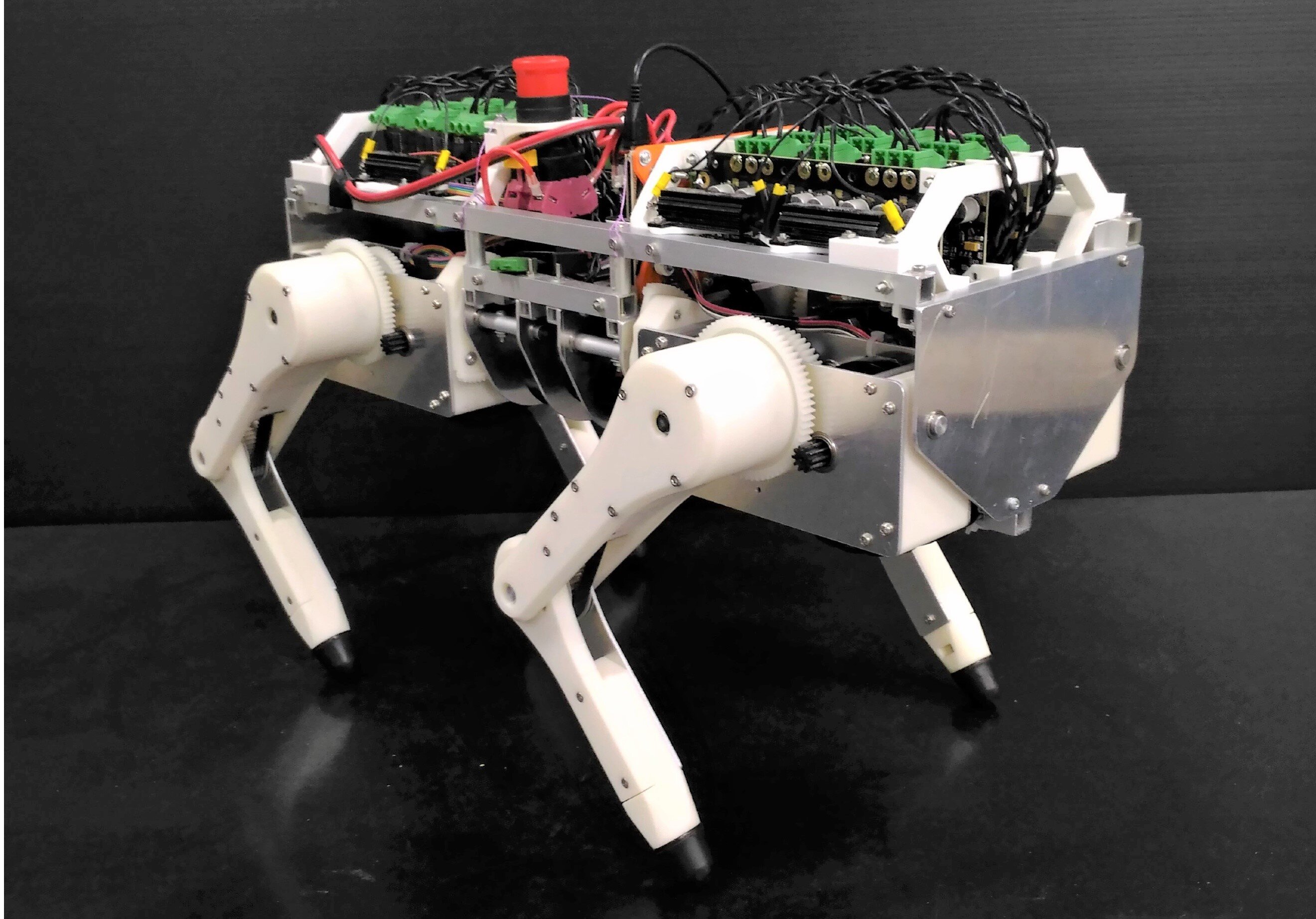

A group of researchers from Osaka University developed a quadruped robot platform that can reproduce the neuromuscular dynamics of animals (Figure 1), discovering that a steady gait and experimental behaviors of walking cats emerged from the reflex circuit in walking experiments on this robot. Their research results were published in Frontiers in Neurorobotics.
It was thought that a steady gait in animals is generated by complex nerve systems in the brain and spinal marrow; however, recent research shows that a steady gait is produced by the reflex circuit alone. Scientists discovered a candidate of reflex circuit to generate the steady walking motion of cats, investigating locomotion mechanisms of cats by reproducing their motor control using robots and computer simulations.
Since experiments using animals are strictly controlled and restricted in terms of animal protection, it is difficult to study animal locomotion. So, it is still unknown how nerve systems discovered in prior research are integrated (i.e., how reflex circuits responsible for animal locomotion are integrated) in the animal body.
Toyoaki Tanikawa and his supervisors assistant professor YoichiMasudaand Prof MasatoIshikawa developed a four-legged robot that enables the reproduction of motor control of animals using computers. This quadruped robot, which comprises highly back-drivable legs to reproduce the flexibility of animals and torque-controllable motors, can reproduce muscle characteristics of animals. Thus, it is possible to conduct various experiments using this robot instead of the animals themselves.
By searching for the reflex circuit that contributes to the generation of a steady walking in cats through robotic experiments, the researchers found a simple reflex circuit that could produce leg trajectories and a steady gait pattern, which they named “reciprocal excitatory reflex between hip and knee extensors.”
In this study, the researchers found that:
- The robot generated steady walking motions by simply reproducing the reciprocal circuit in each leg of the robot.
- The robot’s gait became unstable when the reciprocal circuit was cut off.
- When the mutual excitatory circuit was stimulated, the circuit produced a phenomenon called “prolongation of the stance phase.” This result suggests that this circuit is an important component responsible for walking in cats.
This group’s research results will benefit both the biology and robotics fields. In addition to bringing new knowledge to biology, if robotic animals could serve as a replacement for real animals in the future, it will give more scientists the chance to study the mechanisms of animal locomotion under various experimental conditions. Approximating a robot’s structure to that of an animal will lead to the development of fundamental technologies for making robots that move and maneuver as effectively as animals.
Co-author Yoichi Masuda says, “Gaining knowledge about animals without using experimental animals is also significant for the humans that live with them. Further combination of robotics and biology through the creation of robots that mimic the structures of animals and their locomotion could become the first step towards understanding the principles underlying the behaviors of animals and humans.”
Walking quadruped is controlled and powered by pressurized air
Toyoaki Tanikawa et al. A Reciprocal Excitatory Reflex Between Extensors Reproduces the Prolongation of Stance Phase in Walking Cats: Analysis on a Robotic Platform, Frontiers in Neurorobotics (2021). DOI: 10.3389/fnbot.2021.636864
Citation:
Researchers use robotic platform to study the reflex network of walking cats (2021, May 11)
retrieved 6 June 2021
from https://techxplore.com/news/2021-05-robotic-platform-reflex-network-cats.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.
For all the latest Technology News Click Here
For the latest news and updates, follow us on Google News.