
As the underwater robot OceanOneK carefully navigated toward the upper deck railing of the sunken Italian steamship Le Francesco Crispi about 500 m below the Mediterranean’s surface this month (roughly a third of a mile), Stanford University roboticist Oussama Khatib felt as though he himself was there.
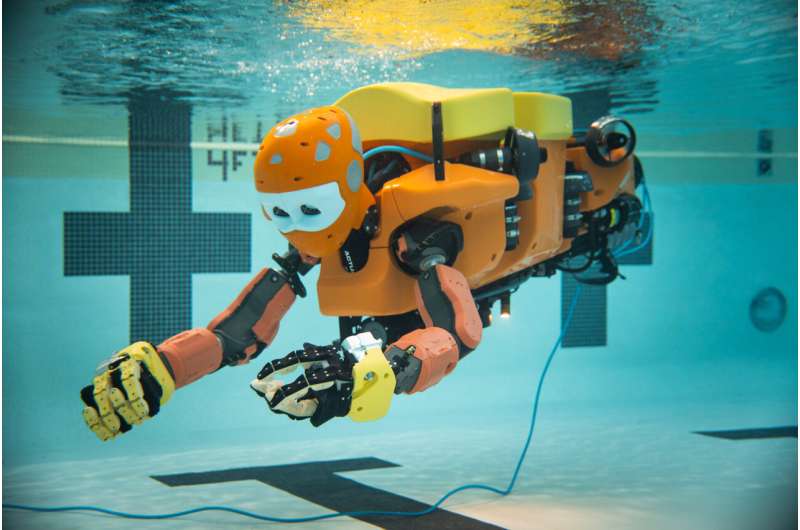
OceanOneK has a humanoid top half and a slimmer back half with eight multi-directional thrusters that allow careful maneuvering underwater. The robot’s haptic—or touch-based—feedback system and stereoscopic vision produced incredibly realistic sensations that equaled what he would have experienced were he down below, rather than above onboard the control ship. Peering through OceanOneK robot’s eyes and feeling through its hands, Khatib perceived a kaleidoscope of life—pink and green and rusty-orange—layered on and around the ship. He felt the resistance of the water and could discern the shapes and proximity of the historic relic around him.
“You are moving very close to this amazing structure and something incredible happens when you touch it: You actually feel it,” said Khatib, who is the Weichai Professor in the School of Engineering and director of the Stanford Robotics Lab. “I’d never experienced anything like that in my life. I can say I’m the one who touched the Crispi at 500 m. And I did—I touched it, I felt it.”
The mission of OceanOneK to these depths had two purposes: to explore places no one has gone before and to show that human touch, vision, and interactivity can be brought to these sites far-removed from where people can operate.
While OceanOneK had many noteworthy adventures and successes during two multi-stop trips around the Mediterranean, the overriding accomplishment of the team—which included Michel L’Hour, the former director of underwater archaeology research in France’s Ministry of Culture (DRASSM), Vincent Creuze from LIRMM at the University of Montpellier, Denis Degez and Franca Cibecchini from DRASSM, and the ship’s crew—was demonstrating functional autonomy at nearly 1,000 m down. It was this advance that earned OceanOne’s renaming to OceanOneK.
“This is the first time that a robot has been capable of going to such a depth, interacting with the environment, and permitting the human operator to feel that environment,” said Khatib. “It has been an incredible journey.”

The first deep dive
February’s dive to the Crispi had been part of a multi-stop tour of the Mediterranean for OceanOneK that started in September 2021 with two stops near Marseille to a World War II P-38 Lightning aircraft at 40 m (about 130 ft) and a submarine, Le Protée, at 124 m (roughly 400 ft). The third was to a second-century Roman ship in Aléria, Corsica at 334 m (nearly 1100 ft) and the Crispi was next.
A search for suitable weather then urged the team toward Cannes. There, the robot’s boom camera had its first use in viewing inside the cockpit of a Beechcraft Baron F-GDPV aircraft that was 67 m down (over 200 ft). The final dive was to 852 m—over a half mile down—where, on pausing for a thruster check, the team found, worrisomely, that the robot was unable to ascend. OceanOneK was fully functioning but flotations around the communication and power line connecting to topside had collapsed, leaving the long, heavy line piled on top of the robot. Pulling in the slack, they were able to continue the dive.
As a commemorative marker, OceanOneK placed a plaque on the seabed that read:
A robot’s first touch of the deep seafloor
A vast new world for humans to explore
OceanOne … two
OceanOneK robot’s expedition to the 1 km mark was long in the works. It started with countless hours of design, experimentation, and assembly with fellow team members in the lab, dozens of trips to the Stanford pool for debugging, and myriad lessons-to-be-learned before facing the unpredictability of the real world.
The predecessor of OceanOneK, OceanOne had been built for reaching depths at most around 200 m. To bring the robot deeper, the researchers adapted its body with special foam made of glass microspheres that provide buoyancy while being capable of withstanding the immense pressure at 1 km depths—pressure over 100 times the experience at sea level. Furthermore, the robot’s arms were filled with an oil and spring mechanism that compresses the oil to match the outside pressure, preventing collapse and cushioning the electronics. The researchers also updated many tiny components throughout OceanOne to minimize the amount of compressible air residing in individual parts and keeping the robot as compact as possible.
OceanOneK featured additional enhancements that increased the versatility of its arm and head motion, and two new types of hands—one developed by Mark Cutkosky’s lab at Stanford and one from Professor Antonio Bicchi of the University of Pisa and the Italian Institute of Technology, IIT.
Ready for trouble
Swimmers at Stanford’s Avery Recreation Pool over the last few years may have seen OceanOneK taking a dip while researchers tried out different maneuvers and experimented with tools. The tools included boxes for carrying objects and the boom-mounted video camera that would let them see inside cramped and inaccessible spaces—spaces where the robot couldn’t go.

“It was many months of testing, during COVID, twice a week,” said Adrian Piedra, also a graduate student in the Stanford Robotics Lab, as they iterated through issues until everything—touch, control, vision—worked without a hitch.
Such preparation paid off in many ways but in particular when the team needed to fix OceanOneK‘s disabled arm during their first expedition. “This required opening the robot into pieces on the deck of the boat, at night, under the wind, and during a storm,” said Khatib. “Our heroic students—Adrian Piedra and Wesley Guo—were working nonstop to fix the robot.” Their persistence, determination, and eventual success astonished everyone on board, according to Khatib.
“The robot has so many features and so many inter-related components that if there’s one part broken, we may need as much as a full day in dismantling, repairing, and reassembling,” said Stanford Robotics Lab graduate student Bo Kim, who traveled with OceanOne and collaborated from campus for OceanOneK. “Everything has to merge together and work simultaneously to have a successful expedition, and that is truly challenging.”
The July expedition
This summer, the team had second chances to dive to the Roman ship and the Crispi, following some difficulties with their first visits. When they first interacted with the Roman ship, the team had tried—but failed—to retrieve an oil lamp from the ship. At the Crispi in February, a fault in the arm prevented the use of the boom camera. For the July dives, it was all systems go.
OceanOneK dove again to the Roman ship, this time under the guidance of the team’s archeologists and successfully brought up a handful of treasured ancient vases dating to the Roman Empire, including some not previously seen in DRASSM’s collections. These were exceptional finds in that they still bore the name and label of their manufacturer, exemplifying the benefits of careful super-deep artifact recovery.
On a second dive to the Crispi, Khatib extended the boom camera into the fractured hull of the ship, being careful not to touch the rupture edges. The team’s marine biologist guided him and watched eagerly as the exterior corals gave way to interior rusticles—icicle-shaped rust formations—which showed the effects of about eighty years of bacterial interaction with the ship’s iron.

Looking back, and ahead
Piedra said that with hindsight, he has begun to see the bigger picture, how large the challenges were that they overcame, and how grand the work is that they accomplished.
“We go all the way to France for the expedition and there, surrounded by a much larger team, coming from a wide array of backgrounds, you realize that the piece of this robot you’ve been working on at Stanford is actually part of something much bigger,” he said. “You get a sense of how important this is, how novel and significant the dive is going to be, and what this means for science overall.”
The OceanOne project not only embodies advanced innovations in haptics, underwater robotics, and human-robot interaction, but also new opportunities for marine science and underwater engineering activities, such as inspecting and repairing boats and infrastructure including bridge piers and submerged pipelines.
Other expeditions are planned in a variety of locales around the world, including lost cities buried within deep lakes, coral reefs, and archeologically significant wrecks at depths so far beyond human reach that OceanOneK presents a unique opportunity for understanding the past.
“Distancing humans physically from dangerous and unreachable spaces while connecting their skills, intuition, and experience to the task promises to fundamentally alter remote work,” said Khatib. “Robotic avatars will search for and acquire materials, build infrastructure, and perform disaster prevention and recovery operations—be it deep in oceans and mines, at mountain tops, or in space.”
Biomimetic elastomeric robot skin has tactile sensing abilities
Citation:
Underwater robot connects humans’ sight and touch to deep sea (2022, July 21)
retrieved 21 July 2022
from https://techxplore.com/news/2022-07-underwater-robot-humans-sight-deep.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.
For all the latest Technology News Click Here
For the latest news and updates, follow us on Google News.